放牧机器人“慧眼识牛”
2026-01-20 08:46
来源:人民日报海外版




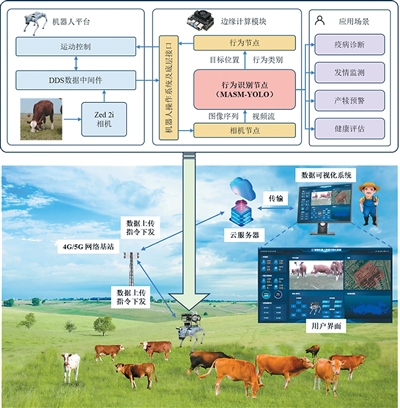
放牧机器人工作示意图。
研究团队供图
近日,中国农业科学院农业信息研究所科学数据研究室利用新一代信息技术,研制出肉牛行为识别轻量化模型MASM-YOLO,实现了对肉牛六类典型行为的快速精准识别,有效提升了牛群饲养管理效率,为放牧机器人装上了“看得清、看得准、跟得上”的智能之眼。
与圈舍饲养不同,天然草原牧场放牧场景对机器视觉感知提出了很高要求,面临着光照变化剧烈、背景环境复杂、牛只群体遮挡以及运动模糊等难题。科研团队在研发四足放牧机器人的过程中发现,传统目标检测或行为识别模型往往难以同时兼顾识别精度与实时性,难以在移动装备和边缘设备上稳定运行。
针对这一难题,研究团队创新研制出 MASM-YOLO 模型。据研究人员介绍,该模型在架构设计上融合多尺度特征提取、自适应检测机制与轻量化骨干网络,围绕“在真实草原环境中可用、好用、稳定运行”这一目标进行系统优化。
在真实牧场实验场景下,MASM-YOLO 模型对站立、躺卧、采食、饮水、回舔和吮吸六类肉牛行为均表现出良好的识别稳定性与准确性,并在识别精度与计算效率之间取得了最优协同,为草原牧场自由放牧场景下的牛群疫病诊断、发情监测、产犊预警和健康评估等饲养管理提供了重要基础。模型本身也很“轻巧”,直接用在四足放牧机器人所使用的机载计算平台上,几乎不影响机器人的正常运行。这意味着,放牧机器人可以一边行走巡牧,一边稳定地“看懂牛在干什么”,为实际应用扫清技术障碍。
据悉,该技术突破不仅为四足机器人安装了“慧眼”,也为全面创制放牧机器人提供了关键技术支撑。随着相关技术的持续完善与应用拓展,智能放牧正在为我国草原畜牧业的高质量发展注入新的科技动能。
该研究得到国家重点研发计划、中国农业科学院农科英才领军人才等项目支持。